AGVs set new standards for inventory transportation
One of the four modes of mobile automation, guided vehicles are ready to improve their flexibility and adapt more readily to changes in real-time conditions.


It’s been a long path for automatic guided vehicles (AGVs) to get to where they are today—a broadly accepted leader in mobile automation. But from all indications, this is also the point where AGVs get really interesting, and with good reason.
New developments are positioning them to become more versatile, independent and cost effective, delivering a steep value curve.
“Automatic guided vehicles are a cornerstone of future automation technology within the four walls,” says Rupesh Narkar, sales director at Swisslog.
But before we get to the future, let’s set the baseline.
John Hayes, sales director at Balyo, explains: “As a transportation mode, AGVs are now as accepted as conveyor as a reliable, cost-effective solution to moving loads throughout warehouses and across manufacturing floors.”
At the same time, AGVs are the polar opposite of bolted-to-the-floor conveyor. These wheel-based load carriers generally follow pre-determined paths, leaving the floor open and unobstructed for maximum flexibility in the workflow of inventory of all sizes and shapes.
Beyond simply moving items from Point A to Point B, “AGVs are all about eliminating unproductive travel time,” says Stephen Dryer, senior global product manager for robotics at MHS.
Additional duties for these fully automated vehicles include load lifting, put away and retrieval as well as picking and kitting functions. While all of those are common AGV transportation applications right now, over-the-road truck loading and unloading at docks remains a top priority for several suppliers going forward. However, no one suggests a timeframe for this yet.

In the early years, AGV installs had varying degrees of success. However, the technology has had a solid run for quite some time.
“AGVs have moved from bleeding edge technology and high-risk applications to established technology for a broad range of applications,” says Dryer.
Throughout it all, AGVs have gone through several iterations of navigation technologies in particular, and are about to undergo yet another.
Vehicles are generally on fixed paths and under remote computer control. They do have onboard capability to precisely follow those pre-determined paths and check their exact location along the way.
They do that using a range of technologies including in-floor wire, on-floor tape and magnets as well as wall-mounted targets such as bar codes. On-board safety features also ensure the vehicles are highly aware of what is present in the direction of travel and react to those obstructions, especially people.
Navigation is where the future starts to creep in with the emerging use of what is called natural environment guidance, much like that used by autonomous mobile robots (AMRs). This guidance technology gives each vehicle new-found, on-board freedom while minimizing infrastructure and maximizing flexibility for future changes.
Meanwhile, traffic routing for all AGVs in a fleet remain centrally controlled. And as experts explained during calls for this story, a next generation of traffic control is in the offing.
And with those two developments, we have crossed the line from the past to the future of AGVs.
“Increased flexibility and an enhanced ability to better adapt to real-time, on-floor conditions individually and collectively are driving these changes in AGV navigation and control,” says Lorne Weeter, vice president sales of mobile automation in the Americas at Dematic.

In talking to the experts here, it becomes apparent these advances have broader implications. “We’re now working on developing the final 10% of what AGVs can do as the infrastructure needed to do it all is reduced,” says John Rosenberger, director of iWarehouse gateway and global telematics at The Raymond Corporation.
Mobile automation club
But first, we have to talk about the mobile automation club. AGVs are not the sole members. Oh, no. AMRs belong as do automatic guided carts (AGCs) and autonomous lift trucks.
Wait a minute. When did we start lumping the four together? Wasn’t it just a couple of years ago that each of these technologies was generally considered an island from the others? But now they’re clumped together? Yes and yes. Things have changed (and it has absolutely nothing to do with Covid).
You need to pay attention because these shifts are not about to stop. In fact, likely we’ll see advances in just the next year that will make some of the distinctions you’re reading now less relevant than they are today.
Weeter says we should take the shifting sands of mobile automation in stride. “There’s overlap between the four technologies, but that’s natural as technology advances. I fully expect AMRs and AGVs to come together eventually,” he says.
Mark Longacre can help us make sense of it all. Longacre serves a couple of roles here. He is both JBT’s senior business strategist for market development of AGVs, and chair of the Mobile Automation Group at MHI. Members of the group build and install any of the four mobile automation technologies.
As Longacre explains, those four have more in common than most people realize at the same time as they complement each other.

To begin, they’re all wheel-based carriers under computer control. AGVs generally carry or tug loads above 1,000 pounds and also do vertical lifting, Longacre explains. AGCs are sometimes called AGV light for their focus on lighter loads, and do not typically do much if any lifting. Similarly, autonomous lift trucks carry or tug the heavier loads and do plenty of heavy lifting. Meanwhile, AMRs typically move lighter loads almost exclusively horizontally. However, AMRs are prominent in the movement of goods to person for picking, a continuation of their Kiva heritage.
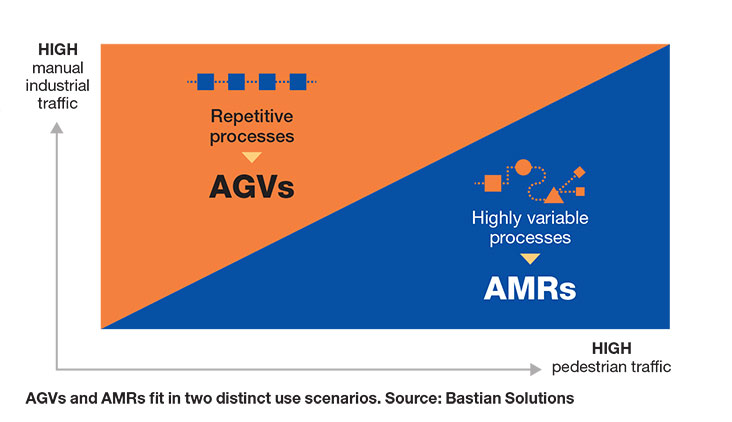
Michael Marcum, Bastian Solutions’ general manager for autonomous vehicles, goes so far as to say the four are so intertwined that only AMRs are not AGVs. And in bouncing that statement off others, there was not much disagreement. Marcum went so far as to create a graphic (p. 40) that details the relative, broad strengths of the collective group of AGVs and those of AMRs.
As to navigation, the MAG group’s website (mhi.org/mag) says, “the main difference between AGVs and AMRs is how the path they follow is determined. Most AGVs follow predefined paths, although there may be areas of the plant or warehouse where they have more freedom. AMRs can determine their own path, although they will attempt to follow suggested paths if they exist.”
Hayes of Balyo calls the two navigation stories “path followed” and “path planned.” The former typically applies to the collective AGVs. And path planned generally applies to AMRs.
Or as Rosenberger says, “AGVs don’t do phones.” This is a clever way to say distractions are not part of the mix for these vehicles.

However, distractions are very much a part of the navigation equation for AMRs and autonomous lift trucks, explains Hayes.
All AMRs have path planning that has been mapped to the robot’s on-board computer using LiDAR, a laser-based contour mapping technology, or SLAM, a simultaneous location and mapping technology.
As the vehicle moves, cameras collect real-time data about the surroundings and any obstacles that could interrupt forward progress. Some autonomous lift trucks follow fixed paths while others use the so-called natural environment technology used by AMRs.
Advances in AGVs
As you might already suspect, software, not hardware, is where suppliers are focusing their development efforts these days.
Clearly, natural environment guidance is gaining ground in AGVs. Longacre says the majority of JBT’s vehicles already use natural environment guidance. And his company is not alone here.
Through its KION Group parent, Dematic is working with Quicktron, a Chinese manufacturer of AMRs. Weeter says the company’s natural environment technology is expected to be available on certain AGVs in the near future. As he said earlier, the move to natural environment is all about improved flexibility and adaptability of the vehicles to demanding operating conditions.
Meanwhile, Rosenberger at Raymond talks about something called sensor fusion. “Utilizing advanced LiDAR perception technology, machine vision and complex route-planning software, sensor fusion allows mobile automation vehicles to adapt to a changing environment in a safe and intelligent manner without shutting down and requiring human intervention,” says Rosenberger.
Raymond uses sensor fusion as a guiding concept for improving AGV efficiency, that final 10% frontier that Rosenberger mentioned earlier.
Fleet management and routing is just as important to ensuring guided vehicle systems are highly effective. Efforts here are coming in many forms.
For instance, Weeter describes AGV Mesh-Up, a joint interface that allows end users to operate an AGV fleet from different manufacturers using different communication protocols. It’s based on a German-based protocol known as VDA 5050. This effort is in the very early stages of proof of concept.
Another entry here from Dematic is a Cloud-based application called AGV Insights. The idea is to collect vehicle data into the Cloud and using advanced machine learning techniques to reduce the time needed to troubleshoot problems. While not an AGV traffic platform, AGV Insights is a monitoring tool.
Synq is Swisslog’s centralized platform that manages all communications between vehicles in the fleet and the traffic management systems. “The concept is to digitize control, visibility and traceability to keep large, complex systems running at top performance,” explains Narkar. The key components, he adds, are a unified, cohesive view of activity and digitization to maximize efficiency and productivity.
Despite a heavy emphasis on these advanced software solutions, AGVs of all types and guidance technologies have a place in industry today, asserts Marcum of Bastian. “It’s a matter of focusing on the best way to transport inventory with as little delay and human involvement as possible. That’s the big picture future of AGVs,” he concludes.

Article Topics
AGVs News & Resources
Automotive materials handling: The calm after the storm Sensor-enabled lift truck attachments as time savers Hy-Tek Intralogistics and K.Hartwall partner Mobile automation drives new infrastructure needs Safety for automatic guided vehicle (AGV) environments Is an automatic guided vehicle (AGV) in your future? Robotics as a service (RaaS) catching fire More AGVsLatest in Materials Handling
Beckhoff USA opens new office in Austin, Texas Manhattan Associates selects TeamViewer as partner for warehouse vision picking ASME Foundation wins grant for technical workforce development The (Not So) Secret Weapons: How Key Cabinets and Asset Management Lockers Are Changing Supply Chain Operations MODEX C-Suite Interview with Harold Vanasse: The perfect blend of automation and sustainability Consultant and industry leader John M. Hill passes on at age 86 Registration open for Pack Expo International 2024 More Materials HandlingAbout the Author
Subscribe to Materials Handling Magazine

Find out what the world's most innovative companies are doing to improve productivity in their plants and distribution centers.
Start your FREE subscription today.
April 2024 Modern Materials Handling
Latest Resources